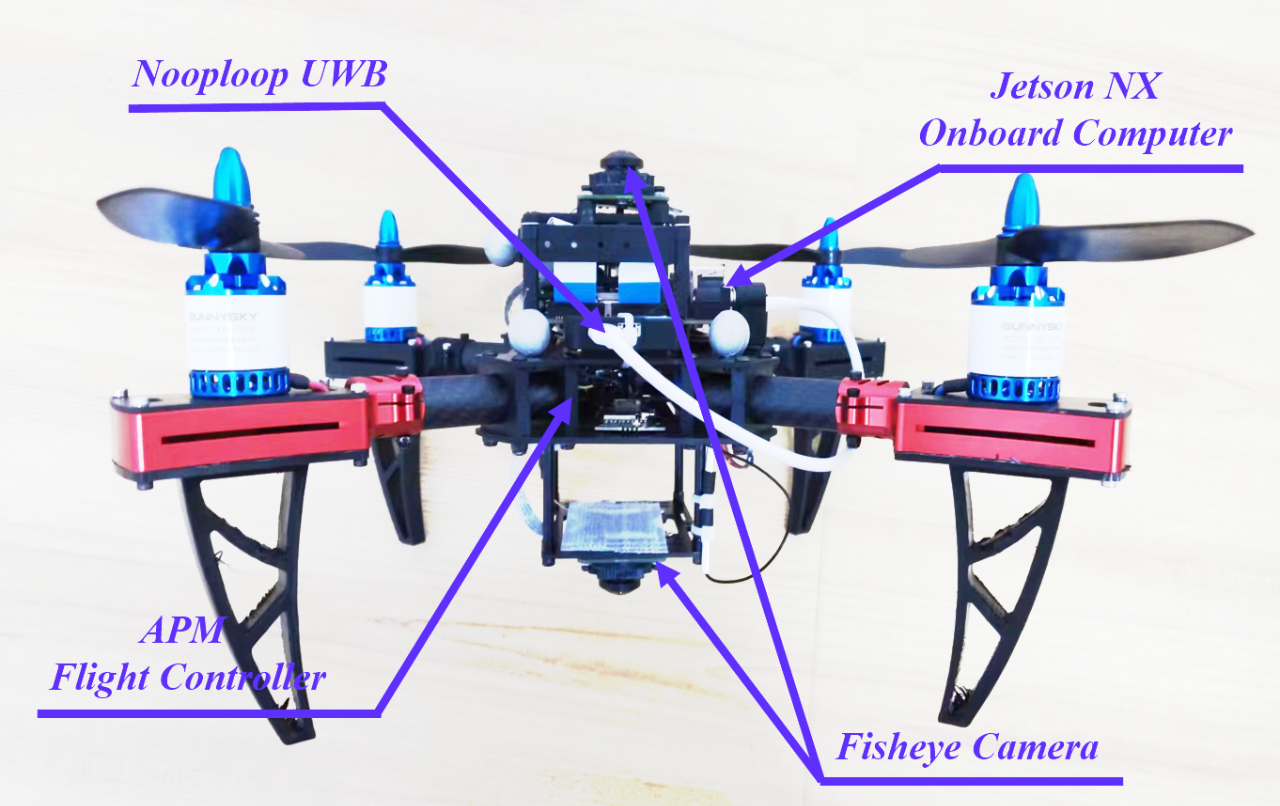
In order to demonstrate the KD-EKF algorithm, a multi-robot system consisting of three self-developed aerial robots Hunter 2.0 is designed. Each robot is equipped with an APM flight controller, a Jetson NX embedded computer, a WIFI communication module, a Nooploop UWB module, and two fisheye cameras. The on-board UWB module and the fisheye camera (with an ultra-wide field of view of up to 200°) are used to measure the relative positions between the robots. Specifically, a YOLOv5-based target detector is implemented to provide relative azimuth observation. The detection algorithm runs at a frequency of 2Hz on the onboard computer. Combined with the ranging observation of the UWB module, the relative positions between robots can be obtained. In addition, an optimization-based visual inertial state estimator is employed to perceive the linear and angular velocities of each robot. The relative position of the robots and the self-movement information of each robot are sent to a centralized server for co-location. In addition, to evaluate the positioning results, the Norkov motion capture system is used to track the real position and attitude information of each robot.