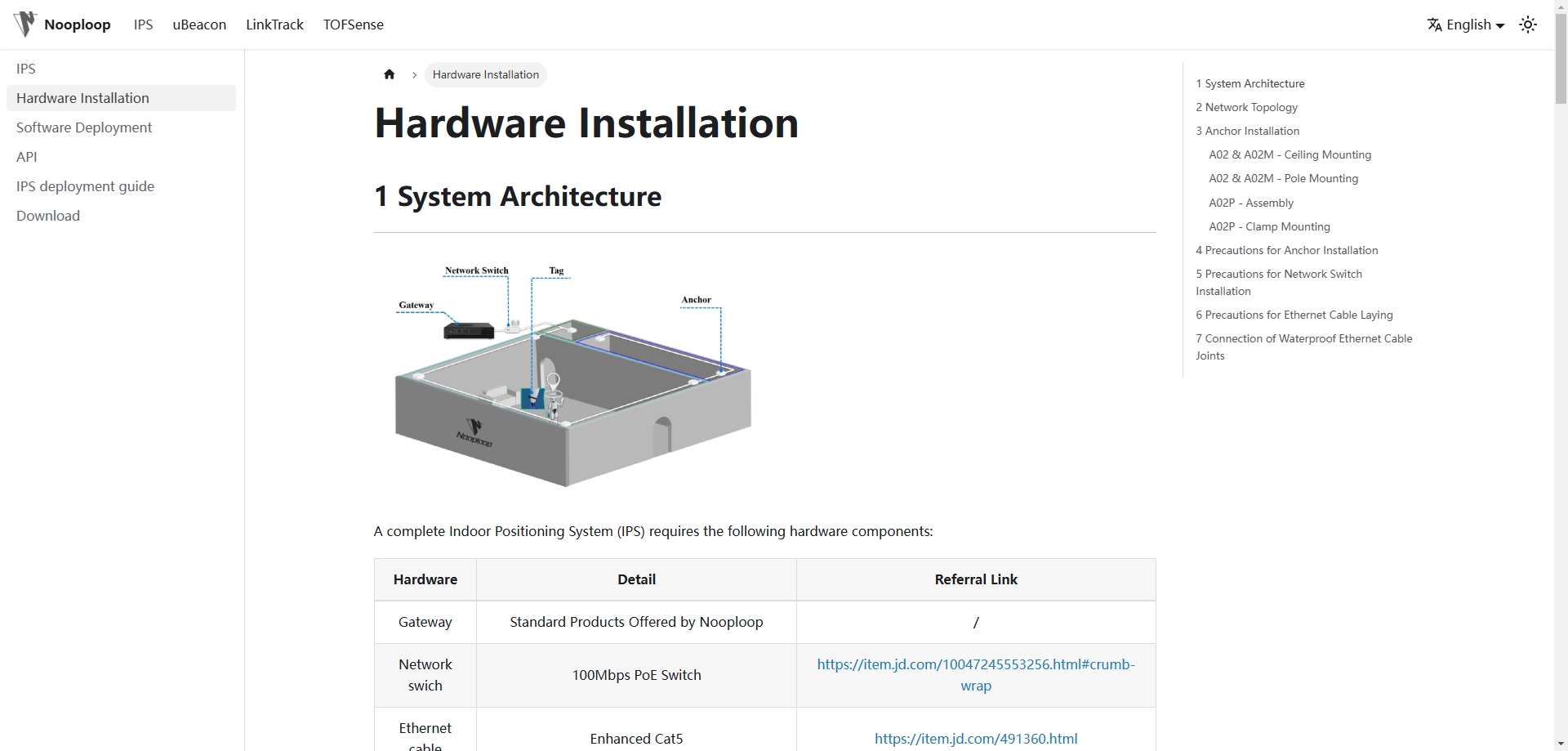

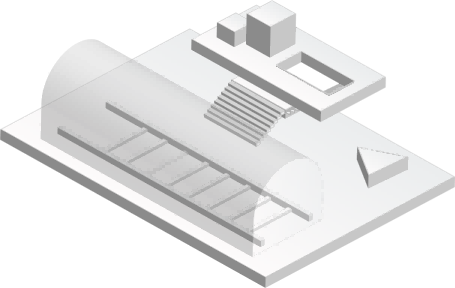






UWB TOF ranging technology
Up to 10cm 3D accuracy
Up to 200Hz frequency and 5ms low latency
- Supports ranging, positioning, data transmission
Lightweight deployment
Application: Drones and Robot Navigation,Sports and Recreation, Research and Education…


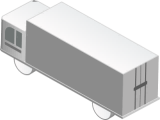
UWB UL-TDOA and AOA technology
Up to 10-30cm accuracy
Ultra-low power consumption for tag
High system reliability
Centralized server management
Application: Smart Factory, Warehouse Logistics, Safety Construction, Power Plant…

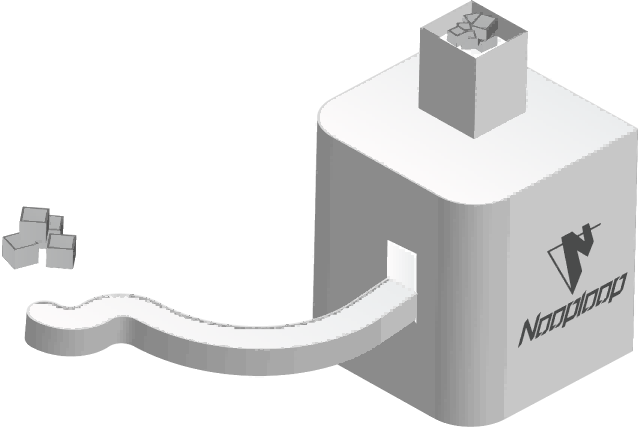
UWB DL-TDOA technology
Up to 10-30cm accuracy
The uBeacon has a battery life of up to 5 years
Wiring Free, Low Deployment Cost
Wireless expansion
Application: Digital Cultural Tourism, Supermarket and Library, Hospitals and Nursing Homes, TransportationHub…








such as navigation and pathplanning.
Intelligent agents such as drones, robots, andunmanned vehicles
provide high-precisionpositioning data to achieve intelligentfunctions
and positioning, Internet of Things, Al, etc. to explore cutting-edge
technologies.
Open APl interfaces and collaborate with research institutions
and universities in the fields of robotics and automation, navigation
device interaction.
Provide precise positioning information for promoting exhibition halls,
museums, exhibition centers, and other occasions to achieve intelligent
goods positioning
Implement intelligent shopping guidance for supermarket shopping cart
positioning, and analyze data and behavior of chain store operators and
Monitor the real-time position of forklifts,personnel, and equipment to
achieve leanmanagement and safe operations
Positioning goods and assets to achieveaccurate and efficient
management ofinbound and outbound operations.